ConMon - System zur automatischen Kartierung von Gebäuden und Erstellung hochpräziser 3D-Modelle
Zielstellung des Projektes
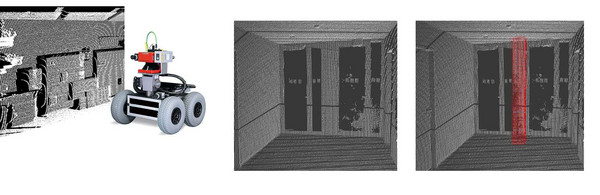
- Entwicklung und Bau eines autonom navigierenden, mobilen 3D-Laserscanners
- Exploration, Kartierung und Vermessung von Innenräumen von Gebäuden zur Qualitätssicherung, Qualitätskontrolle und Dokumentation
- Ergebnis der Vermessung ist ein 3D-Modell, das sich aus mehreren Einzelscans zusammensetzt
Projektergebnisse
Es wurde eine mobile, autonom navigierende Sensorplattform entwickelt, die sowohl unbekannte Umgebungen explorieren, wie auch bekannte Umgebungen autonom und ohne Benutzerinteraktion vermessen kann. Das Ergebnis einer Vermessung ist ein 3D-Modell in dem die Maßhaltigkeit der aufgenommenen Szene bewertet werden kann. In einer Folge von Aufnahmen können automatisch Veränderungen detektiert und visualisiert werden. Die Erkennung von Bauwerksveränderungen kann prinzipbedingt im Allgemeinen nicht ohne Apriori-Wissen erfolgen. Der Vergleich der Ergebnisse der Referenzvermessung mit den Vermessungsergebnissen der entwickelten Sensorplattform zeigt, dass große Strukturen, wie Wände gut und allgemein korrekt erfasst werden. Der Fehler gegenüber der Referenzvermessung liegt im Durchschnitt unter fünf Millimetern. Der Maximalfehler bleibt unter zehn Millimetern. Je kleiner die untersuchten Strukturen jedoch werden und umso größer der Messabstand ist, umso größer wird der beobachtbare Fehler. Auch die Korrektheit der Winkel und die Maßhaltigkeit bezogen auf die Gesamtgröße wurden somit nachgewiesen. Der grundlegende Unterschied besteht aber vor allem darin, dass das von der Plattform erzeugte 3D-Modell im Gegensatz zur manuellen Vermessung auch die Situation der Decken und Fußböden erfasst, was gegenüber der aktuell eingesetzten Vermessungsmethodik große Vorteile bietet, da erheblich mehr relevante Informationen aufgenommen werden.