SERBA - Selbstorganisation von Robotern in beengten Räumen mit manuellen Arbeitsplätzen
Zielstellung des Projektes
- Schaffung der Grundlagen und der Aufbau eines Demonstrationssystems zur Echtzeit-Selbstorganisation von Robotersystemen in gemeinsamen Arbeitsräumen mit instationären Hindernissen
- Aufgabenorganisation unter Echtzeitanforderungen
- Umwelterfassung und -berücksichtigung unter Echtzeitanforderungen
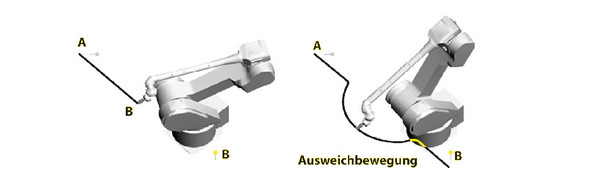
- Kollisionsfreie Bahnvorgaben unter Echtzeitanforderungen
Projektergebnisse
Mit den algorithmischen Entwicklungsarbeiten, der erweiterten Planungsebene, der Implementierung einer dynamische Trajektoriengenerierung unter Einbeziehung von Sensorik und der direkten Ansteuerbarkeit von Robotern in SERBA.sim sowie den erfolgreichen praktischen Tests wurden die Grundlagen für ein wesentlich erweitertes Applikationsspektrum der aufgabenorientierten Roboterprogrammierung geschaffen und verifiziert, die anwenderseitig allein das technologische Know-how nutzt und keine spezifischen Kenntnisse der eingesetzten Roboter erfordert und ohne Programmiersprachen auskommt. Das Applikationsspektrum umfasst Handhabungsaufgaben von Robotern in beengten und von beweglichen Hindernissen beeinflussten Arbeitsräumen. Das Verfahren zur echtzeitfähigen Hindernisumgehung auf Basis von Sensorinformationen ist nicht nur für die Mensch-Maschine-Kooperation beim Robotereinsatz geeignet, es vereinfacht auch Programmanpassungen bei veränderten Zellenstrukturen. Die modulare Struktur des Gesamtsystems gewährleistet auch weiterhin die kundenspezifischen Konfigurierbarkeit für spezielle Anwendungen.